Urgent Need for Verification & Validation (V&V) and Test & Evaluation (T&E)
UAM networks require V&V and T&E at multiple layers across multiple scales, ranging from individual vehicle components to network-level emerging behaviors. Such systems typically possess hybrid dynamics, are difficult to model and analyze, and require reasoning about human interference, intervention, guidance, and assistance. Therefore, novel V&V and T&E tools that are scalable and modular, and that can flexibly accommodate evolving specifications and requirements, are needed

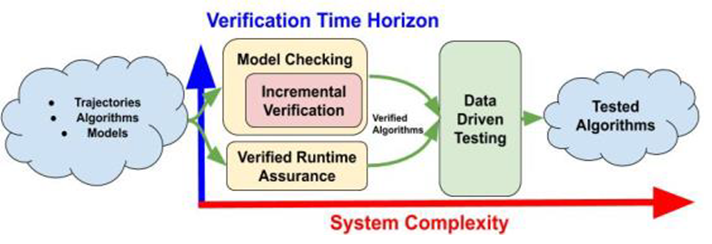
TC3 will verify algorithms developed in TC1 and TC2 through the following objectives, and provide a formal framework to analyze results of tests in TC4
- (Objective I) Verified Run-Time Assurance Mechanisms (RTA)
- (Objective II) Hybrid UAM Model Checking
- (Objective III) Incremental Verification Techniques
- (Objective IV) Testing autonomous capability of UAVs using data-driven techniques